








Si super is the ultimate stepping servo motor system equipped with the 12bit encoder and our own positioning algorithm.

New sense of stepper motor

Si super is the ultimate stepping servo motor system equipped with the 12bit encoder and our own positioning algorithm.
Si super is the ultimate stepping servo motor system equipped with the 12bit encoder and our own positioning algorithm.
Features
Really necessary performance is condensed in it.
The latest control technology and the hardware enable to exhibit the performance of the stepper motor to the fullest.
The latest control technology and the hardware enable to exhibit the performance of the stepper motor to the fullest.
1. Smoothness that can not be compared to the stepper motor even at low speeds.
It has achieved the performance of the highest peak as the stepper motor by combining our own database correction control to pursue both the smoothness and high speed.
Motor Model: SM-02MH (Si super)
Load moment of inertia: 45×10-7kgm2
Motor Model: SM-02MH (Si super)
Load moment of inertia: 45×10-7kgm2
2. Minimize the time of up to a complete stop by the residual vibration suppression.
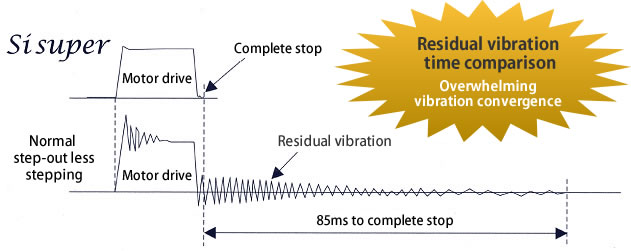
When the motor makes the sudden stop from the rotating state, vibration is generated by the impact when it stops and it becomes residual vibration. Until this residual vibration is eliminated the
machine will not be able to work, even though it is not a large amplitude such as the overshoot.
Si super can converge vibration rapidly and reduce the cycle time of the device significantly, which is incomparable with the normal stepper motor.
Si super can converge vibration rapidly and reduce the cycle time of the device significantly, which is incomparable with the normal stepper motor.
3. Minimize the work damage by overshoot less
In precise fields such as the semiconductors and the liquid crystal, the shock due to the overshoot action of the motor gives a major impact on the quality of the work.
Si super can eliminate the overshoot problems up to limit that the conventional stepper motor could not solve, and is possible to use even to devices that deal with high-quality work with confidence.
Normally, in the triangular drive in high-speed operation with short strokes, the deviation of the position and speed get greater by the influence of mechanical inertia and the overshoot is prone to happen. But Si super is possible to stop the load stablly even in rapid deceleration of less than 20ms from 1500min-1.
Si super can eliminate the overshoot problems up to limit that the conventional stepper motor could not solve, and is possible to use even to devices that deal with high-quality work with confidence.
Normally, in the triangular drive in high-speed operation with short strokes, the deviation of the position and speed get greater by the influence of mechanical inertia and the overshoot is prone to happen. But Si super is possible to stop the load stablly even in rapid deceleration of less than 20ms from 1500min-1.
Specifications
| Model | Si-02DS | ||||
|---|---|---|---|---|---|
|
Application motor * (B) is with brake |
SM-L5M SM-02MH(B) SM-04MH(B) SM-09MH(B) SM-12MH(B) |
||||
| Rated output current (A0-p) | 2 | ||||
| Maximum output current (A0-p) | 4 | ||||
| Control mode |
Servo control mode / step control mode Switch by parameter |
||||
| Control method | Transistor PWM (sine wave drive) | ||||
| Allowable load inertia | 30 times of motor inertia | ||||
| Position feedback | 12-bit one revolution absolute encoder (4096 resolution) | ||||
| Outline dimensions (mm) | W34, H98, D80 | ||||
| Outline Mass (kg) | 0.24 | ||||
|
Feed voltage
(V) |
Motive power | DC24V±10% | |||
| Control power | DC24V±10% | ||||
|
Supply current (A) |
Power current (A) | 2.0 (MAX4.0) | |||
| Control current (A) | 0.4 | ||||
| Position command system | Position command pulse train | ||||
| Operating temperature | 0 to +50 ℃ | ||||
| Storage temperature | -20 to +85 ℃ | ||||
| Operation and storage humidity | Less than 90% RH (non-condensing) | ||||
| Seismic motion | 0.5G | ||||
| Shock resistance | 2G | ||||
| Regeneration capability | Built-in, The regenerative processing circuit can be connected to the outside (option). | ||||
| Electronic gear |
The motor revolution by setting the electronic gear (32,768 × 1/65,535) to (32,768 × 65,535/1) can be driven with a pulse The two-stage switchable by the control input |
||||
| Overtravel prevention function |
Hardware OT, software OT (Select the Enable / Disable by the parameter) |
||||
| Point table positioning | No | ||||
| Homing | 1 rotation absolute initial position pulse train output, built-in homing function | ||||
| Jog | There is a simple function for commissioning. | ||||
| Step feed operation | There is a simple function for commissioning. | ||||
| Speed control operation | No | ||||
| Torque limiting function |
Normal time forward / reverse torque limit (set in parameter) The forward rotation of the control input / 5 stage switching for reverse torque limit (Each torque limit value is set by parameter) |
||||
| Monitoring facility |
LED 1 point (alarm display by blinking) Numerical monitor by USB connection (dedicated PC monitor software screen display) |
||||
| Protective function |
Body EEPROM error, motor EEPROM error, encoder error, System malfunction, excessive position deviation, A-phase overcurrent, B-phase overcurrent, Operating temperature abnormality, overload, power supply overvoltage, power supply voltage down, control power failure |
||||
| Multi-axis connection function | (Multiple axes can be set and adjusted by connecting using a USB hub) | ||||
| Serial communication I / F |
USB 1ch (Full-Speed Function) (Parameter setting, for the dedicated PC monitor software) |
||||
| Standards, environmental compatibility | UL compliance / CE (self-declared) / RoHS correspondence | ||||
Options
| Option name | Models | m number |
|---|---|---|
| Motor cable | SiS-MCB□□M | 3,5,10 |
| Encoder cable | SiS-ECB□□M | 3,5,10 |
| Supply cable | SiS-PWBC03M | 3 |
| I / O cable | SiS-IOB03M | 3 |
| I / O cable | SiS-IOPLS03M | 3 |
| Regenerative cable | Si-RGVC | 1 |
| Pulse output cable | SiS-PLS03M | 3 |
About the order
Orders and inquiries of this product, please contact Sanmei Co., Ltd.
Sanmei Co., Ltd. Website
Sanmei Co., Ltd. Website