位置・速度・トルク すべてに妥協なし!
お客様から求められていた制御要素を最新の技術により
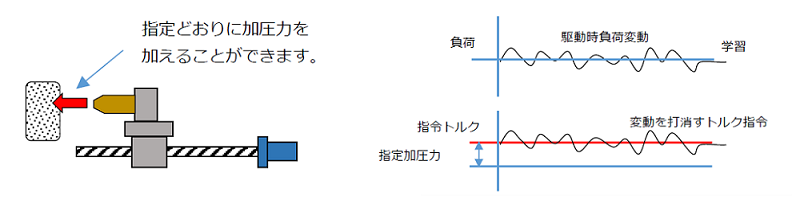
極限まで正確に実行する能力を身につけました。
1.脱着レス・高精度ステッピングサーボ
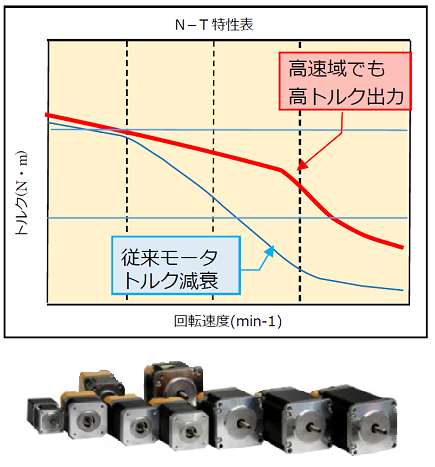
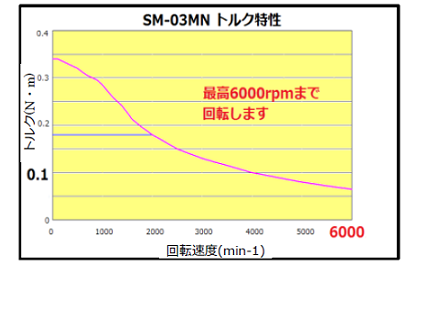
2.高速・高回転領域のパワーアップ
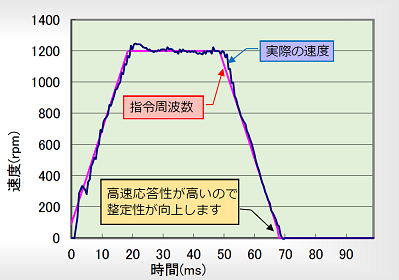
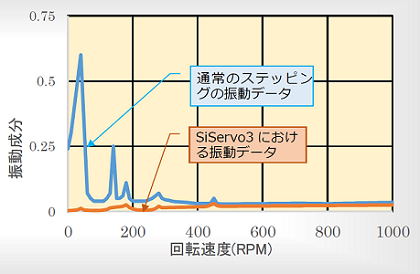
3.振動レス・低発熱・滑らか

全ての制御要素を極めたステッピングサーボモータ

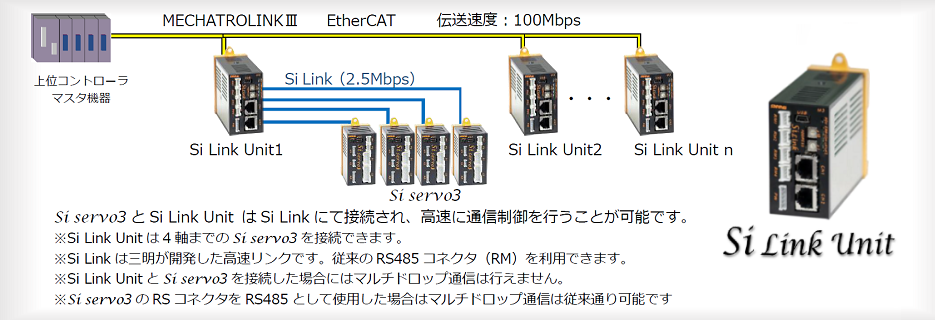
高速フィールドバス対応リンクユニット

位置決めコントローラ内蔵ACサーボドライバ・モータ

新開発のアクチュエータ

アライメント用UVW軸ステージコントローラ

パネル一体型コントローラー

ACサーボモータ搭載、シャープなシャクリが自慢

ナノインプリント
リソグラフィー

MEMSデバイス、及び各種半導体研究用スプレーコーター

サイズ自由、追加工・塗装色も指定可能の板金キャビネット

| 型式 | Si-02DT | Si-05DT | |||
|---|---|---|---|---|---|
|
適用モータ |
SM-L5MT SM-02MT SM-03MN SM-04MT SM-07MT SM-08MT SM-09MT |
SM-12MT SM-20MT |
|||
| 定格出力電流(A0-p) | 3 | 5 | |||
| 最大出力電流(A0-p) | 6 | 10 | |||
| 制御モード |
サーボ制御モード / ステップ制御モード パラメータにて切替 |
||||
| 制御方式 | トランジスタPWM (正弦波駆動) | ||||
| 許容負荷イナーシャ | モータイナーシャの20倍 | ||||
| 位置フィードバック |
インクリメンタルエンコーダ(10,000分解能) (Si servo2 モータ接続時は 800又は 1,600分解能) |
||||
| 筐体構造 | ブック型 | ||||
|
概略寸法(mm) [突起部含まず] |
39(W) × 70(H) × 55(D) | 42.2(W) × 76(H) × 85(D) | |||
| 概略質量(kg) | 0.1 | 0.19 | |||
|
入 力 電 源 |
電源電圧 (V) |
動力電源 | DC24V±10% | ||
| 制御電源 | |||||
|
定格電源電流 (A) |
動力電流 (A) | 2.8A | 4.0A | ||
| 制御電流 (A) | 0.05A | 0.05A | |||
|
最大電源電流 (A) |
動力電流 (A) | 4.0A | 5.0A | ||
| 制御電流 (A) | 0.1A | 0.1A | |||
| 位置指令方式 |
位置指令パルス列 / ポイントテーブル指令 / ダイレクト通信コマンド |
||||
|
使 用 条 件 |
使用温度 | 0 ~ +50 ℃ | |||
| 保存温度 | -20 ~ +85 ℃ | ||||
| 使用・保存湿度 | 90%RH以下 (結露なきこと) | ||||
| 耐震動 | 0.5G | ||||
| 対衝撃 | 2G | ||||
|
入 力 |
制御入力 |
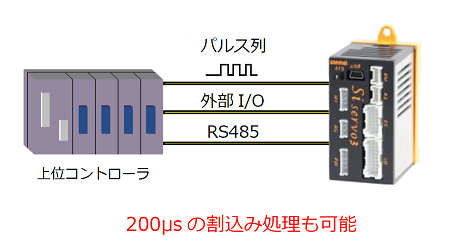
5点 (200μS以下拘束応答入力をパラメータで機能選択) フォトカプラ 最大DC30V |
|||
| 位置指令パルス列入力 |
CW/CCW、PULSE/SIGN、A/B相入力 (パラメータで選択) 5Vラインドライバ (26C31相当) 5V・24Vオープンコレクタからのフォトカプラ入力 |
最大応答周波数 (1相あたり) |
ラインドライバ:750kpps / オープンコレクタ:200kpps (どちらもパルスデューティ 50%時) |
||
|
出 力 |
制御出力 |
3点をパラメータで機能選択 / オープンコレクタ 最大DC30V / 50mA |
|||
| ブレーキ開放出力 | 無電圧接点出力 最大DC60V / 1A | ||||
| エンコーダ出力 | Z相出力のみ | ||||
|
内 蔵 機 能 |
位置制御モード |
サーボモード (重ね合わせ制御) ステップモード パラメータ切替え |
|||
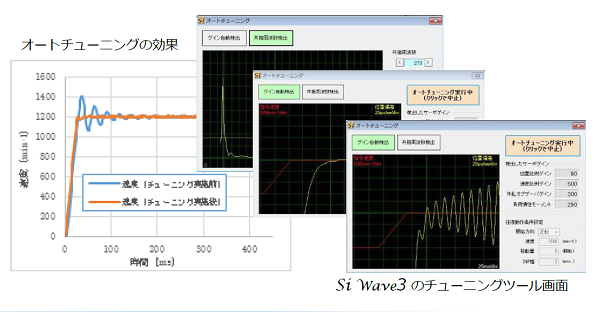
| サーボオートチューニング | USB経由のPCによるオフラインオートチューニング | ||||
| 制振制御 |
振動抑制フィルタ 2段 トルクノッチフィルタ 4段 | ||||
| ダイナミックブレーキ機能 | なし | ||||
| 回生機能 | オプションにて外部に回生処理回路を接続可能 | ||||
| オーバトラベル防止機能 |
ハードOT / ソフトOT (パラメータより有効 / 無効を選択) | ||||
| 電子ギヤ |
モータ1回転を (10,000 × 1/65,535) ~ (10,000 × 65,535/1) パルスで設定可能 制御入力による2段切替え可能 |
||||
| ポイントテーブル位置決め |
プログラミング容量:256行 (プログラムによる位置決めが可能) 外部 I / Oまたは通信コマンドによる指令操作 |
||||
| 原点復帰 | 内蔵原点復帰機能 (7種類) | ||||
| その他運転 | ジョグ運転 / ステップ送り運転 | ||||
| トルク制限機能 |
通常時正転 / 逆転トルク制限値制御入力による正転 (0.1%単位で設定) / 逆転トルク制限5段階切替え (各トルク制限値はパラメータに設定) |
||||
| トルクリサーチ機能 | トルク学習による負荷トルク脈動成分を補正するデータの自動保存 | ||||
| モニタ機能 |
LED2点 (緑・赤)点滅によりアラーム表示、制御出力信号 RS485、又はUSB接続によるPCモニタ画面表示 | ||||
|
保護機能 アラーム |
本体 EEPROM異常 / モータ EEPROM異常 / エンコーダ異常 / システム異常 / 位置偏差過大 / A相過電流 / B相過電流 / 動作温度異常 / 過負荷 / 動力電源過電圧 / 動力電源減電圧 / 制御電源異常 |
||||
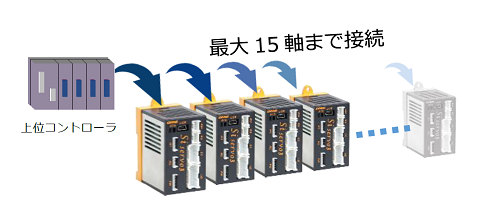
| 多軸接続機能 |
RS485マルチドロップ接続、USBハブ接続の何れかにより 複数軸の設定・調整が可能 |
||||
| シリアル通信I/F |
RS485 × 1ch (最大115kbps) / USB 1.1ch × 1ch (Full-Speed Function) ※ USBは制御用として使用できません |
||||
| 群制御通信コマンド | グループ分けした群に対する一斉通信コマンド | ||||
| リンクユニット接続 | リンクユニットは Si Link を介して高速フィールドバスへ接続 | ||||
| 自動メール転送機能 | 接続されたPCモニタソフトの拡張機能 | ||||
| 規格、環境適合 | CE (自己宣言) / RoHS2 対応 | ||||
| 名称 | 型式 | 長さ(m) |
|---|---|---|
| モータケーブル
Si-02DT用 |
Si3-MCB□□M (※1) | 3,5,10 |
| モータケーブル
Si-05DT用 |
Si-MCBHC□□M | 3,5,10 |
| エンコーダケーブル | Si3-ECB□□M (※2) | 3,5,10 |
| 電源ケーブル
Si-02DT用 |
Si-PWBC□□M | 3 |
| 電源ケーブル
Si-05DT用 |
Si-PWBHC□□M | 3 |
| I/Oケーブル | Si-IOB□□M | 3 |
| 回生ケーブル | Si-RGVC | 1 |
| RS485 マスターケーブル | Si-RSM□□M | 3 |
| 電磁ブレーキケーブル | Si-BRK□□M | 3 |
| RS485 スレーブケーブル | Si-RSS | 0.5 |
当製品のご注文・お問い合わせは、株式会社三明までお願いいたします。
株式会社 三明 ホームページ
 三明電子産業株式会社
三明電子産業株式会社